Rob|Arch 2014 will offer 8 workshops dealing with different aspects of robotic fabrication, including multi-robot cooperation, sensor feedback, and advanced design to production workflows. All workshops take place in parallel from the 14th to the 16th of May. The results will be discussed at the conference – along with the scientific papers – on the 17th and 18th of May.
Please visit our travel details page for information on transportation and accommodations to each of the three universities hosting workshops.
University of Technology Sydney & University of Michigan
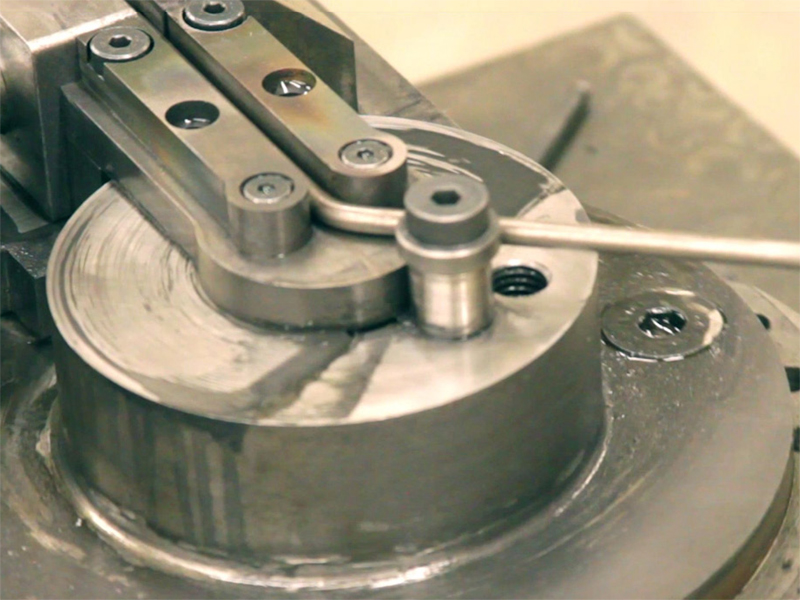
superFLEX: Behavioral Bending
This workshop will deploy robotic rod bending, robotic welding and robotic assembly, together with computer vision and algorithmic feedback response within a fabrication workflow that includes the synchronized production, handling, and assembly of uniquely bent parts to test and demonstrate the concept of Adaptive Part Variation (APV). APV is an extension of craft based practices where parts are created or modified during sequential assembly processes to fit the accumulating scenario. This process is particularly well suited to the inherent variability of Numerically Controlled fabrication when acting in combination with sensor measurement, computational design and file-to-factory workflows.
Location:
University of Michigan
Registration ID:
THIS WORKSHOP HAS REACHED CAPACITY AND IS NO LONGER AVAILABLE
Workshop Co-Chairs:
Dave Pigram, Iain Maxwell, Lauren Vasey
Robot Workcell:
2x KR120HA w/ Roboteam
Special Hardware:
Custom CNC bender, MIG welding
Software:
Python, superMatterTools

University of Stuttgart
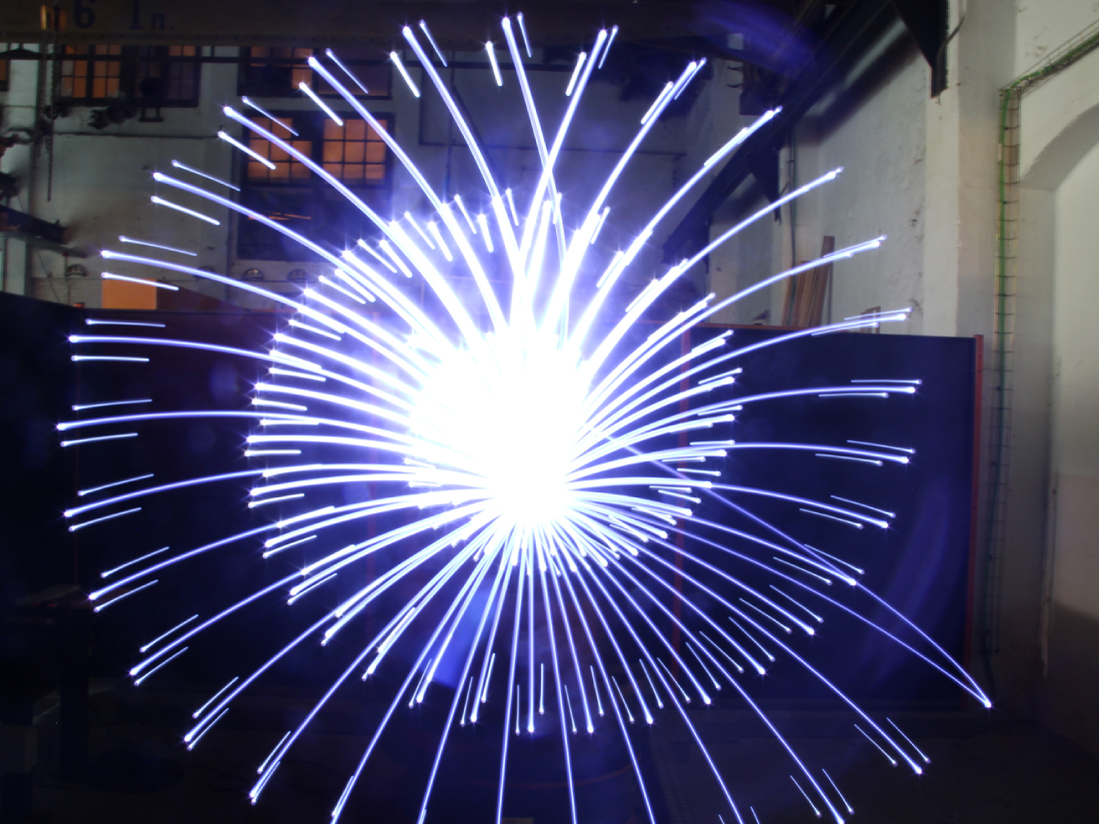
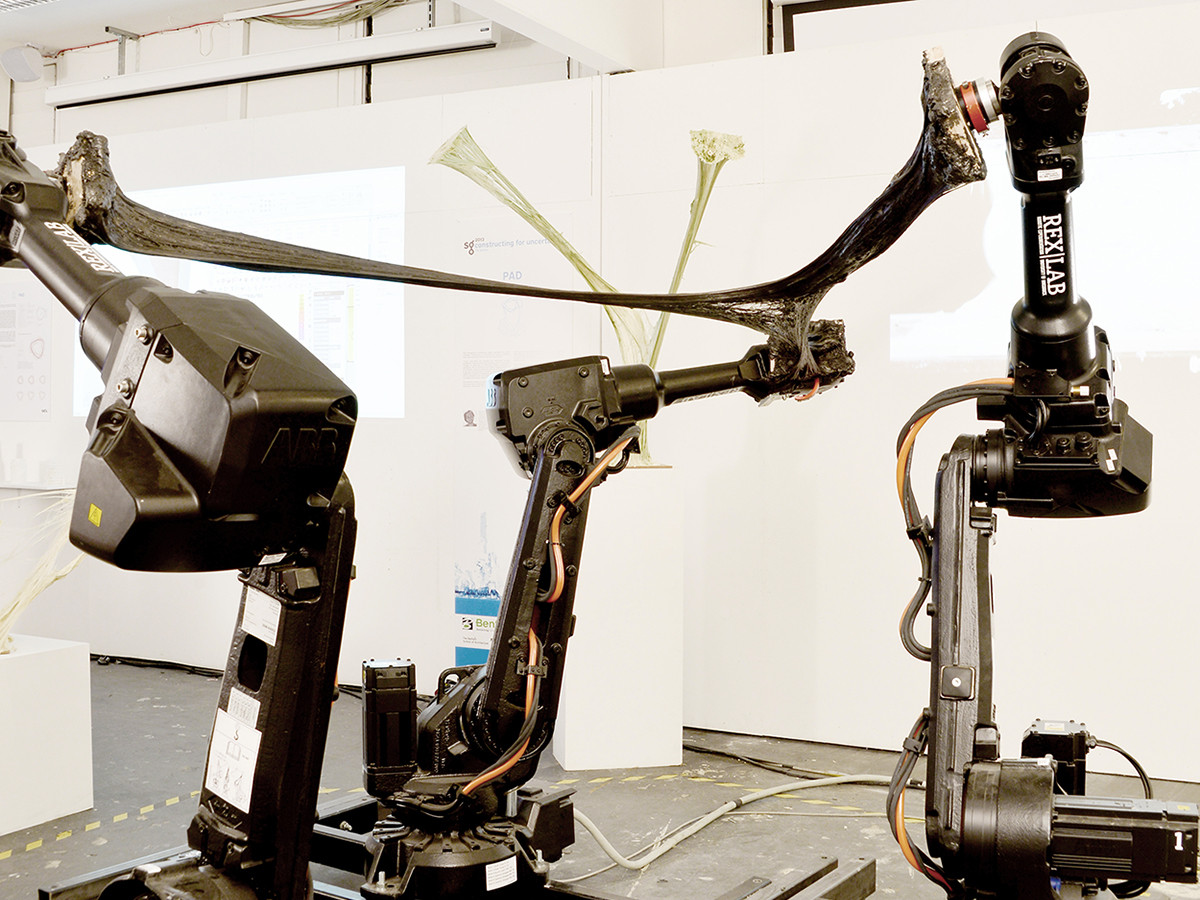
Fiber Syntax
Fiber-reinforced polymers (FRP) possess a number of characteristics such as a high load-bearing capacity combined with minimal self-weight, which have made them the preferred choice for structural applications in a variety of engineering fields ranging from automotive to ship-building to aerospace. The performative nature of these material systems is further enhanced through design considerations at the scale of material organization which allows for a higher degree of material efficiency and morphologic articulation in light-weight constructions. Such a system requires the fabrication of complex geometries with precisely controlled fiber orientation — a difficult process to achieve on an architectural scale using traditional modes of fabrication. Existing manufacturing techniques for FRP rely on costly formwork for serial production of identical elements or complex adaptable formwork for one-off production. Neither of these strategies seems applicable to the building industry. Coreless winding strategies developed for the ICD/ITKE Research Pavilions reduces the necessity for formwork to a minimum while providing a high degree of freedom for geometrically differentiated building components.
Location:
University of Michigan
Registration ID:
THIS WORKSHOP HAS REACHED CAPACITY AND IS NO LONGER AVAILABLE
Workshop Co-Chairs:
Moritz Dörstelmann, Ondrej Kyjanek, Marshall Prado, Tobias Schwinn, Achim Menges, Jan Knippers
Robot Workcell:
2x KR60
Special Hardware:
Filament winding system
Software:
Python, Grasshopper



IAAC & University of Michigan
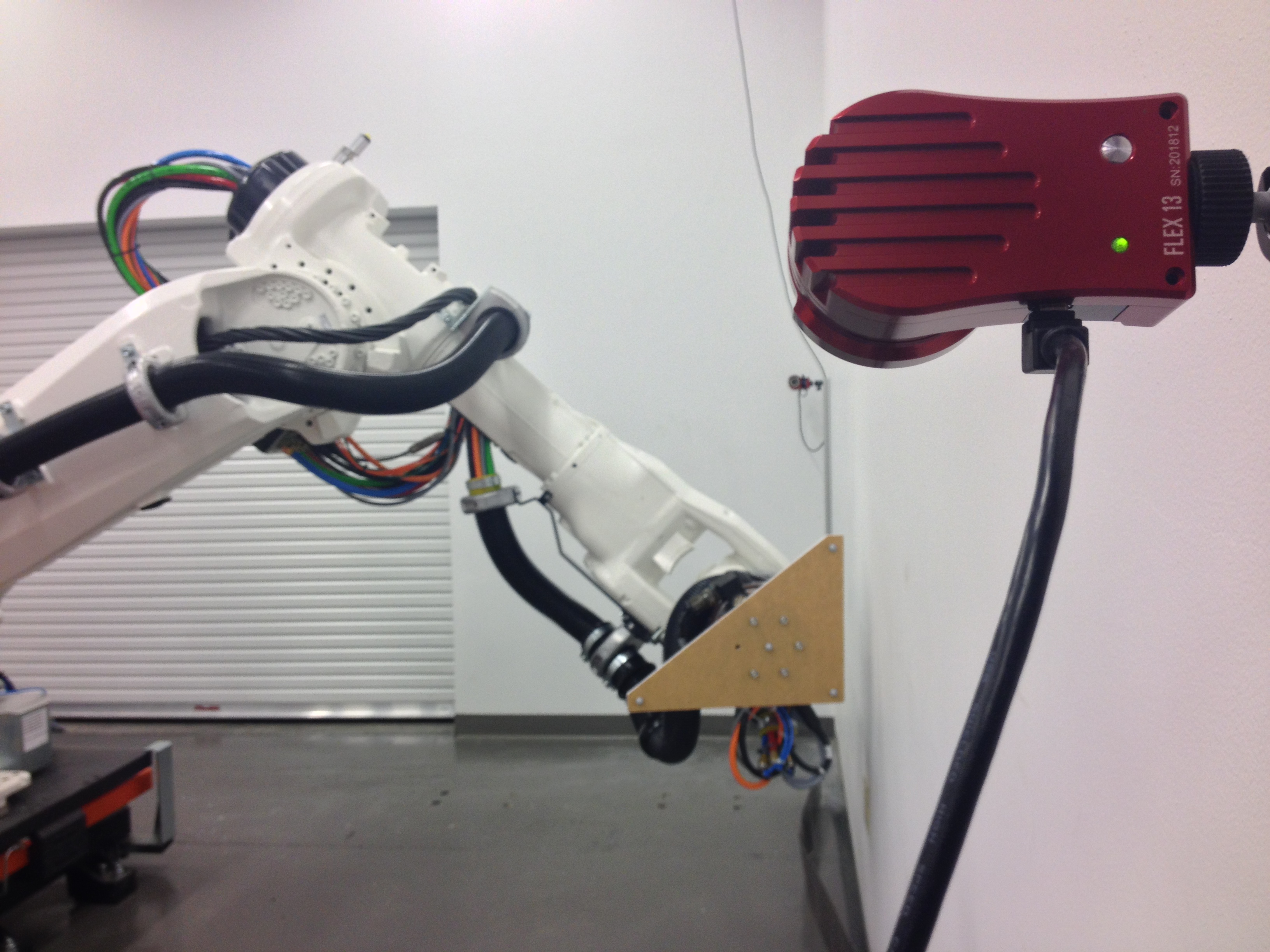
Sense It 6-Axis
Sense-It explores the potentials of materially-directed generative fabrication through an integration of research in robotic sensing, plastic deposition, and generative code. This approach tests the limits of a machine-material-sensor interface to act autonomously, without direct adjustments from an observing operator, and capitalizes on sensor responsiveness and material agency to produce unpredictable outcomes. This workshop moves away from optimization and efficiency as the primary drivers of digital fabrication in pursuit of a model where materials assume maximum agency in the fabrication process. Feedback loops between machining parameters, real-time sensors, and plastic deposition will infuse the workshop results with both intelligence and an intentional instability, where the outcomes can be guided but never fully predicted.
Location:
University of Michigan
Registration ID:
THIS WORKSHOP HAS REACHED CAPACITY AND IS NO LONGER AVAILABLE
Workshop Co-Chairs:
Alexandre Dubor, Gabriel Bello Diaz, Guillem Camprodon, Adam Fure, Ellie Abrons
Robot Workcell:
2x KR6R900
Special Hardware:
Analog input and output interface
Software:
KUKA|PRC

Bot & Dolly
Craft Class 4 Robots
We will work through two creative spaces – fabrication design and visual effects – to leverage multiple human-robot interfaces for programming motion. The workshop encourages rapid iteration and experimentation using parametric and animation toolsets to design both sequential and timebased motion. Through iterative design charrettes, participants will be introduced to motion design for synchronous robotics, motion capture using multiple sensory inputs, and workflows for rapid ideation.
Location:
University of Michigan
Registration ID:
THIS WORKSHOP HAS REACHED CAPACITY AND IS NO LONGER AVAILABLE
Workshop Co-Chairs:
Kendra Byrne, Matthew Bitterman, Brandon Kruysman, Jonathan Proto
Robot Workcell:
2x KR60
Special Hardware:
Analog input and output interface, custom workstations
Software:
Rhino 5, Grasshopper

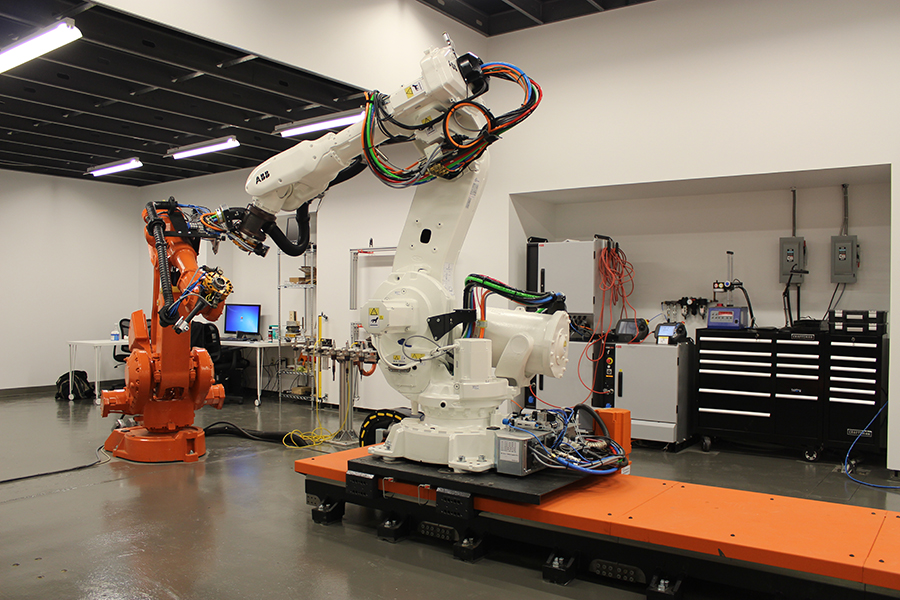
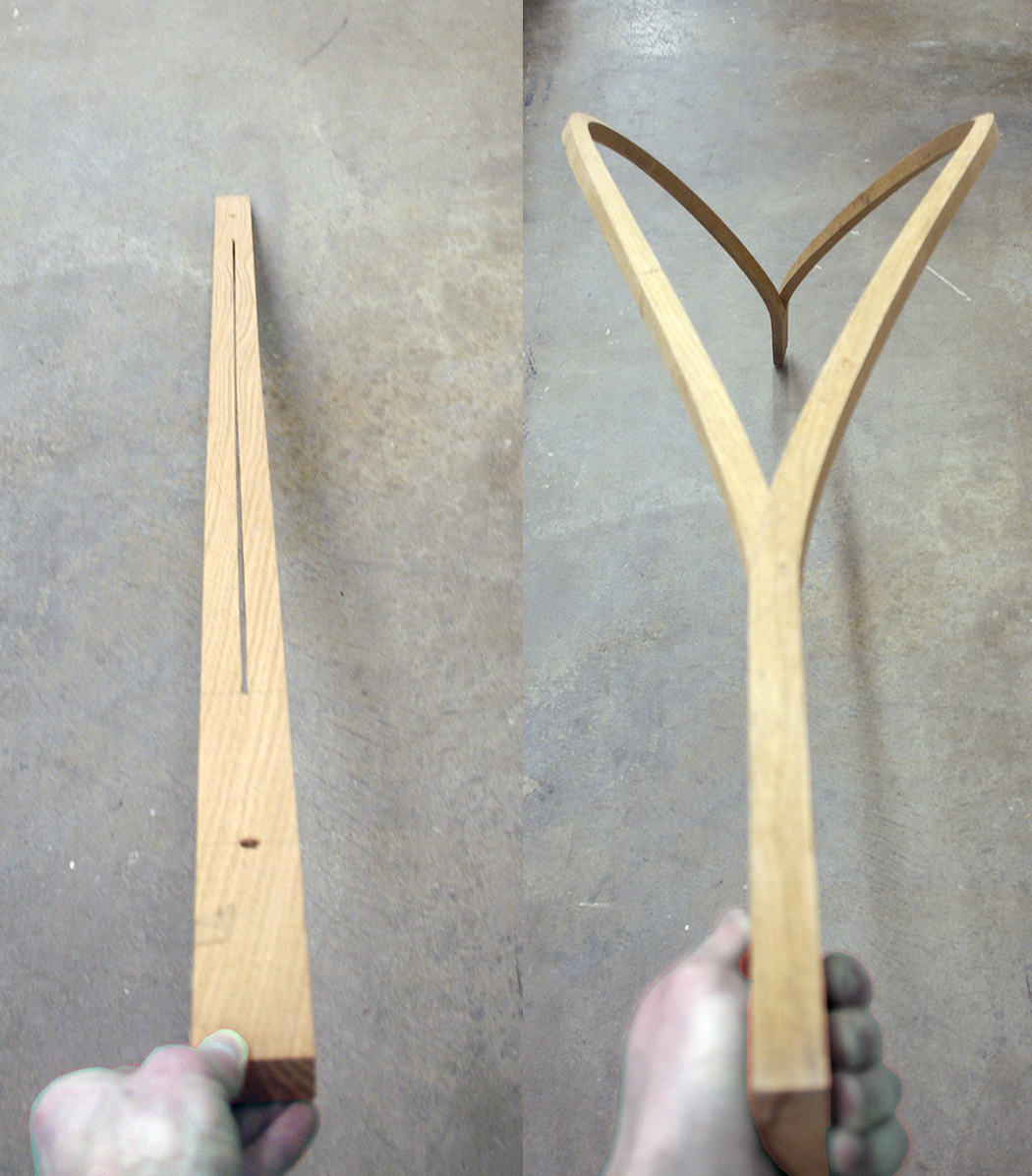
Carnegie Mellon University
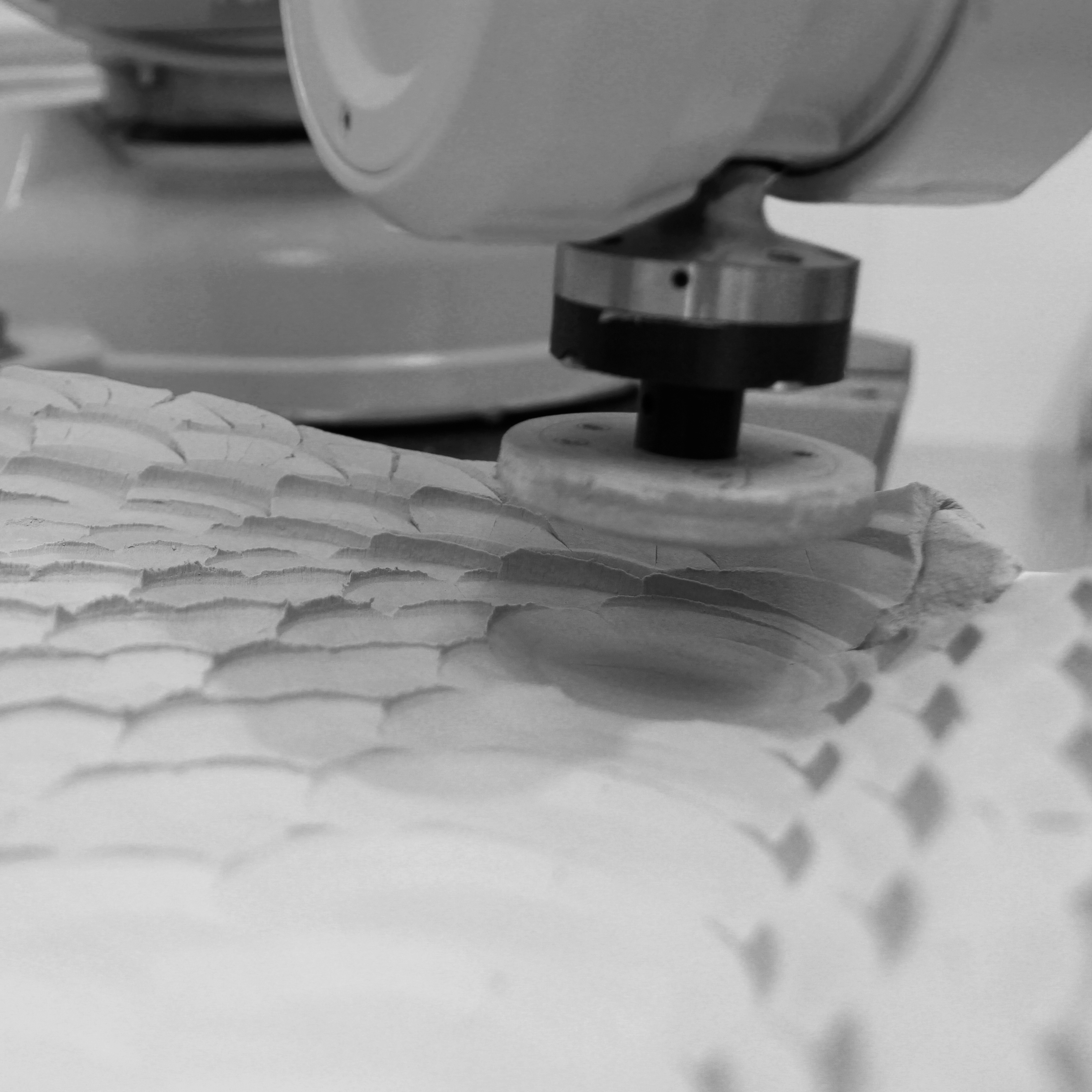
All Bent Out: Adaptive Fabrication of Bent Wood Assemblies
All Bent Out explores adaptive fabrication techniques for robotically constructing steam-bent wood assemblies. The workshop explores a constellation of hardware and software tools that leverage the material constraints of steam bending (e.g. spring back, irregular grain) as opportunities to develop adaptive fabrication workflows where predetermined machine tasks can be informed by sensor-based events. In particular, workflows using coordinated motion control of two industrial robots and environmental sensing help to negotiate discrepancies between intended, digitally modeled geometries and actual, physically bent wood assemblies.
Location:
Carnegie Mellon University
Registration ID:
CMU I
Workshop Co-Chairs:
Joshua Bard, Madeline Ganon, Zack Jacobson-Weaver, Michael Jeffers, Thibault Schwartz,
Richard Tursky
Robot Workcell:
IRB 4400 & IRB 6640
Special Hardware:
Steam bending equipment
Software:
HAL
University of Innsbruck & Harvard Graduate School of Design
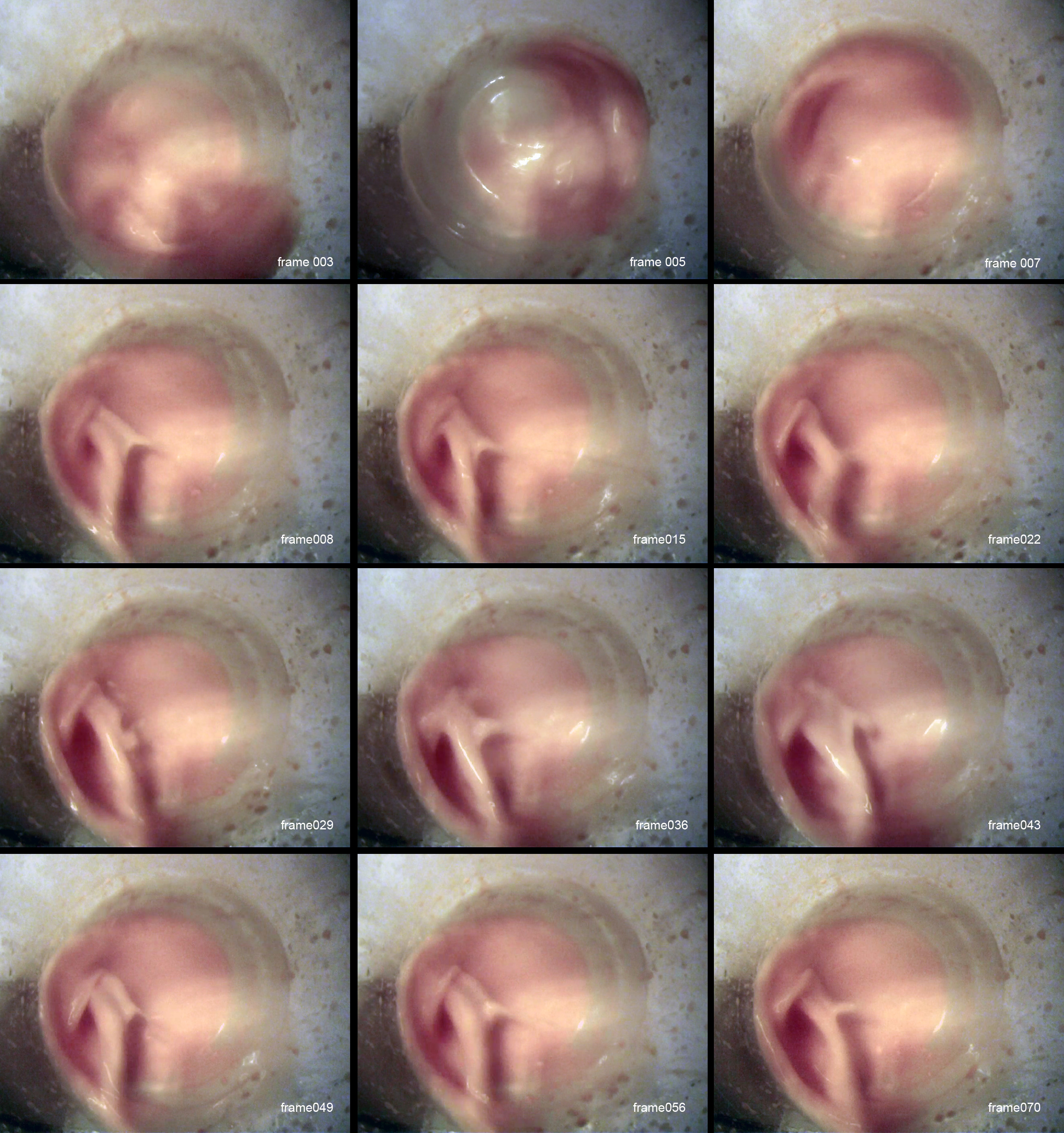
Phase Change: Explorations in Robotic Forming of Thermoplastic Materials
This workshop will explore opportunities to overcome tooling limitations in the formation of individualized thermoplastic building components using robotic formation during phase change and speculative additive robotic processes (3D Printing). Explorations will include the translation of the rigid ideal of computational design space to the soft reality of an uncertain built environment as mediated by the industrial robotic work cell. In this case, the industrial robot precisely translates the digital geometry but the final form is characterized by the uncertainties of the thermoplastic material behavior during phase-change. The resulting artifacts will emerge from the integration of the precise and the imprecise through a feedback loop between the digital design environment and the results of a series of physical material experiments. Material properties are considered intrinsic to the design process and the robotically controlled fabrication process will be saturated by feedback from the behavioral logics of the material itself. The exploration of complex material behavior during phase-change will extend to the introduction of novel additive manufacturing technologies through the combination of generic robotic manipulators and custom end effectors.
Location:
Carnegie Mellon University
Registration ID:
CMU II
Workshop Co-Chairs:
Georg Grasser, Nathan King, Kadri Tamre, Allison Weiler, Marjan Colletti
Robot Workcell:
2x IRB 1600
Special Hardware:
Custom End-effectors
Software:
HAL, Grasshopper, Karamba

Harvard Graduate School of Design & Graz University of Technology
Informal Material Formations
The workshop invites participants to explore the opportunities that arise when unpredictable scrap materials is to be configured into desirable design outcomes. This involves rethinking the essence of ‘design’ itself. In the workshop design is the constant negotiation between what is desired and what is available, what is fixed and what is open-ended, what is controlled by designers and what is managed by the system. After introducing the theoretical framework for Informal Material Formation the workshop directly engages participants by exploring the enabling custom interface for Rhino and Grasshopper (developed at Harvard GSD). This environment computationally coordinates the computer vision system and its related robotic motion with the design input from participants. Participants will be able to pursue their own design interests and agendas within this framework, with a focus on physical prototyping of experimental designs.
Location:
Carnegie Mellon University
Registration ID:
CMU III
Workshop Co-Chairs:
Felix Raspall, Stefan Peters, Felix Amtsberg, Martin Bechthold
Robot Workcell:
IRB140
Special Hardware:
Kinect Sensor, Custom forming tools
Software:
HAL, Firefly, Grasshopper

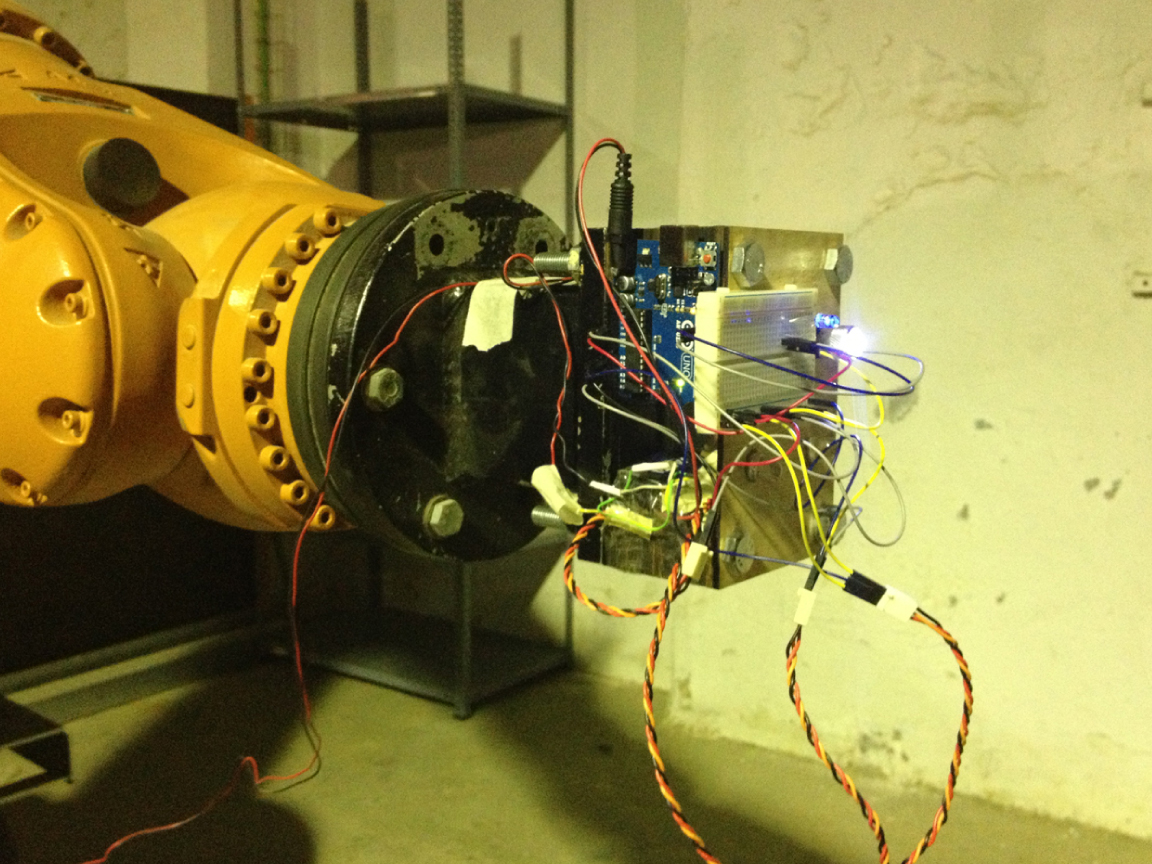
Princeton University & Greyshed
Augmented Materiality
This workshop will demonstrate strategies for interactive and intuitive robot control during the design and fabrication processes. Rather than using the robot in isolation as a means for fabricating digital design, the robot acts as one of many mediators between the digital and physical world throughout the design process. Employing 3D scanning technologies in conjunction with user tracking, human interface devices, various sensors and augmented reality strategies, we are able to demonstrate multidirectional communication between the human designer, physical materials, computer simulation and robotic scanning/manipulation. The setup and tools will be used, experimented upon, and (ideally) modified by workshop participants.
Location:
Princeton University
Registration ID:
Princeton
Workshop Co-Chairs:
Ryan Luke Johns, Nicholas Foley, Axel Killian
Robot Workcell:
IRB6400 & IRB7600
Special Hardware:
Kinect Sensor
Software:
Rhino, Processing